
Engineers at RMIT University in Australia have developed a remote-controlled miniature robot designed to collect oil spills from the surface of water using a novel filtration system inspired by sea urchins.
Oil spills remain a major environmental hazard worldwide, capable of damaging marine ecosystems, killing wildlife and costing billions of dollars to remediate. The researchers say the new device could offer a safer and more targeted way to respond to spills, particularly in sensitive or hazardous environments.
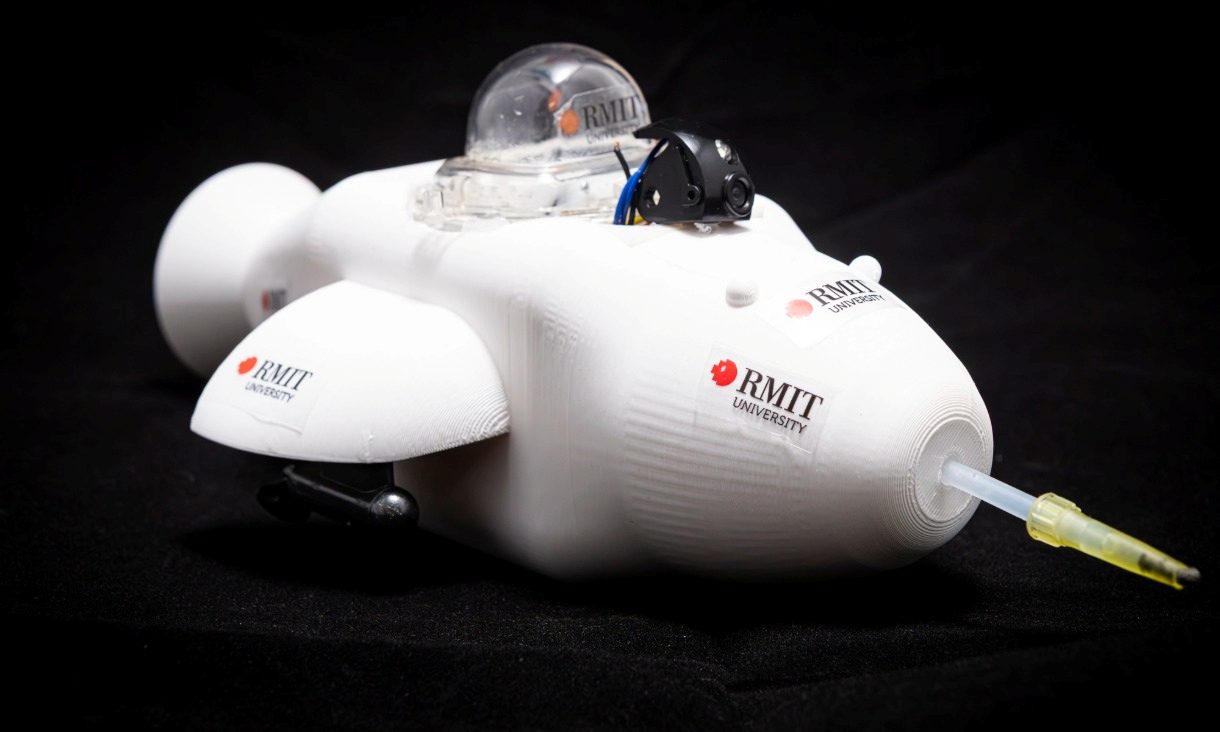
The prototype robot – the ‘Electronic Dolphin’ – is roughly the size of a shoe and shaped like its marine namesake. It skims across the water surface while drawing oil through a specially designed filter that repels water but absorbs oil.
A coated filter is situated at the front of the robot and a small pump pulls oil through the filter into an onboard collection chamber.
Lead researcher Ataur Rahman, from RMIT’s School of Engineering, said the proof-of-concept device illustrates how small robotic platforms could help support oil spill responses without putting people in danger.
“Oil spills can take a huge environmental and economic toll. We wanted to create a system that can be deployed quickly, steered accurately and used in areas that are too risky for people to access,” he said.
“We have a long-term vision of creating dolphin-sized robots that can vacuum oil, return to base to empty their tanks, recharge, then redeploy automatically – repeating the cycle until the job’s done.”
The experimental robot currently runs for around 15 minutes on its battery, although the researchers say a future version could operate for longer depending on the size of the pump and onboard oil storage capacity.
“Unlike past oil cleanup materials that often use harsh, hazardous chemicals and work only as fixed filters involving manual operation, our new technology is made using an eco-friendly coating for [a] filter we developed,” Rahman said.
In controlled laboratory tests, the prototype recovered oil at a rate of about two millilitres per minute with more than 95 per cent purity, while maintaining performance without the filter becoming waterlogged.

The filtration system relies on a microscopic coating structure that forms tiny spikes resembling those found on sea urchins. These structures trap pockets of air that cause water to roll off the surface, while oil adheres to it, allowing the material to selectively collect oil without absorbing water.
Surya Kanta Ghadei, a PhD researcher who led much of the materials development, said the project was partly inspired by personal experiences of environmental damage.
“Growing up in India, I saw the impact oil spills can have on marine life, especially turtles,” he said.
“That stayed with me. When I began my PhD, I wanted to create something that could help responders act faster and keep wildlife out of danger.”
The team is now investigating ways to scale the technology by expanding the filter area across the robot’s surface and pairing it with a higher-capacity pump. Future work will include field testing and long-term durability assessments.
Rahman said the researchers are seeking industry or innovation partners to refine the design for practical applications and explore wider deployment opportunities.
The research is detailed in the paper “Multifunctional superwetting sea urchin mimetic nanosheet based interface for remote oil–water separation”, published in the journal Small.





